2022年10月25日,应太阳成集团tyc33455ccwww院长丁华锋教授邀请,清华大学赵慧婵副教授和中国科学院深圳先进技术研究院徐天添研究员分别在上午10点、下午2点为我院师生作线上学术报告,报告分别由李敏老师和蒋淑兰老师主持,共有500多人次的师生参加。
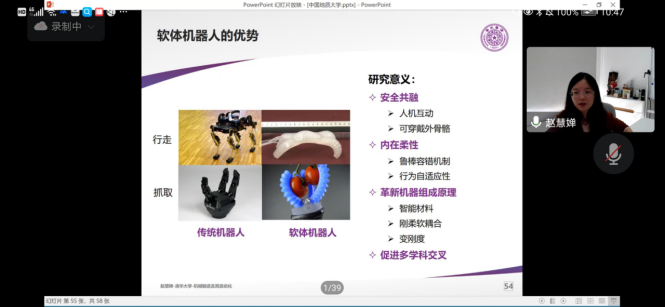
赵慧蝉教授作了题为“柔性人工肌肉技术及其机器人应用”的学术报告。她首先详细介绍了介电弹性体柔性驱动器的发展历程和发展现状,通过刚软机器人的对比,引出柔性驱动技术的研究意义,以及该技术在软体机器人的高性能的通用人工肌肉相关领域的实际应用:柔性触觉传感阵列、微型飞行机器人、亚厘米尺度管道探测机器人,并生动地向大家展示了他们近期在这类驱动器的制备、建模、设计和机器人应用上取得的研究成果。最后,赵慧蝉教授对柔性人工肌肉技术及其机器人应用的未来发展方向做出了展望。
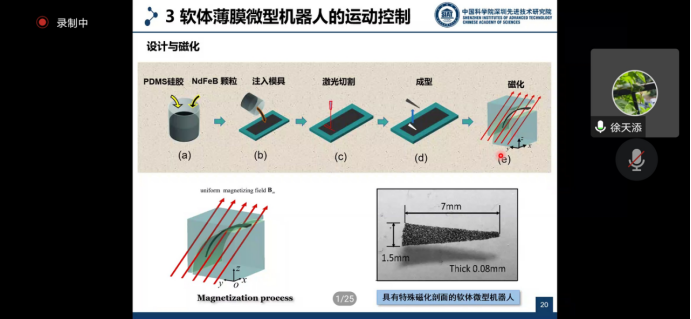
徐天添研究员在磁驱动微型机器人方向开展了长期系统性研究,通过优化设计提高了微型机器人的运动效率,解决了软体微型机器人的多模态运动问题,以“磁驱动软体薄膜微型机器人的多模态运动与协同控制”为题作交流报告,报告围绕着软体薄膜微型机器人的运动控制展开,介绍了磁驱动螺旋型微型机器人和软体薄膜微型机器人的三维路径跟踪控制,以及适应复杂环境的多模态运动机制。微型机器人如何在相同的外界磁场中做出不同的运动,并且协同作业是一项很大的挑战。单个微型机器人的异性特质是控制处在同一磁场中的多个微型机器人运动的关键。基于对软体机器人的磁化方向与运动效率的研究,设计薄膜机器人的异构磁化方向,控制不同微型机器人的速度差,以实现协同控制。最终实现四个软体薄膜微型机器人的独立位置控制,以及三个微型机器人的独立路径控制,为软体薄膜微型机器人在生物体内协同靶向治疗提供了理论基础与技术依据。
报告结束,赵慧蝉教授和徐天添研究员对师生们提出的问题进行深入交流和解答。
太阳成集团tyc33455ccwww
2022年10月25日
版权所有:© 太阳成集团tyc33455ccwww|欢迎您 All Rights Reserved
地址:湖北省武汉市鲁磨路388号太阳成集团tyc33455ccwww 电话:027-67883273
